

Эволюция роботов? Недавно это звучало как научная фантастика, а сегодня – это реалии. Какие результаты получают ученые во время своих исследований и какие выводы они делают – читайте в переводе материала издания Wired.
Эволюция – это путешествие. С одной стороны, это простой механизм: те, кто приспосабливаются к своей среде, имеют больше потомства, а особи с низким уровнем адаптации – размножаются не столь активно, в то время как их гены вообще отфильтровываются из системы. Но с другой стороны, эволюция привела к появлению удивительного количества организмов. Некоторые животные имеют оперенные крылья, другие – мембраны между пальцев. Некоторые бегут на двух ногах, другие на четырех. Каждый адаптируется к своей среде по-своему.
Эволюция невероятно мощная, и это та самая сила, в которой робототехники ищут вдохновение для своей работы. В рамках подтверждения обоснованности концепции, команда ученых из Австралии исследует, как эволюционные алгоритмы могут создать робо-ноги, предназначенные для перемещения по конкретным поверхностях. Результаты одновременно логичны, парадоксальны и удивительны, а также подталкивают робототехников на новый способ создания ходячих машин.
Исследователи начинают с 20 рандомизированных форм цифровых ног, ограниченных до определенного размера (то есть, не следует ожидать 5-метровых ног из фильмов ужаса). Каждая схема основывается на элементах, называемых кривыми Безье.
"Кривая Безье – это когда вы находитесь в Microsoft Paint, и определяете кривую, щелкнув на пару контрольных точек, но в трех измерениях, – объясняет научный сотрудник Дэвид Ховард (David Howard) из Государственного объединения научных и прикладных исследований Австралии. - Система проектирует эти кривые на решетку 3D пикселей, известных как воксели. Где кривая пересекается с вокселем, мы размещаем материалы в этот воксель. Все остальное пусто".
Это придает каждой схеме свою уникальную форму.
Симуляция проверяет пригодность и приспособленность данной ноги для хождения по одной из трех поверхностей: жесткий грунт, гравий или вода. Только вместо того, чтобы выбирать такие возможности, как хорошее зрение или маскировочная окраска, как было бы при естественном отборе, система выбирает, сколько крутящих моментов должен сделать механизм, чтобы заставить ногу идти по одной из поверхностей. Другими словами, хорошая нога – энергоэффективная нога. Также был бонус за ноги, которые нуждались в значительно меньшем количестве материала.
«Если у нас есть гравийная поверхность, по которой идет нога, мы рассчитываем силы, действующие на каждом отдельном камешке гравия», – говорит Ховард. – Это дает нам точное представление о том, что на самом деле делает нога в окружающей среде». То же самое с водой и жестким грунтом.
Далее исследователи принимают эти оригинальные 20 ног и объединяют их с теми, что продемонстрировали себя наилучшим образом. То есть, выбирают наиболее пригодные ноги для создания дочерних ног. «Мы просто делаем это снова, снова и снова», – говорит Ховард. На протяжении сотни поколений. В конце концов, они удалили половину популяции с самыми низкими показателями, как неблагоприятные факторы окружающей среды, которые могут уничтожить популяцию животных. И тогда мы получаем автоматическую адаптацию к окружающей среде».
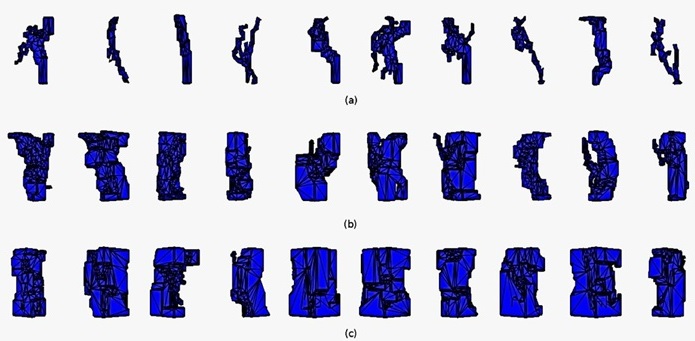
Посмотрите на изображение выше. Сверху расположены те ноги, которые по определению эволюционного алгоритма, наиболее эффективно будут ходить по жесткому грунту. Средняя строчка лучше всего подойдет для гравия, а нижняя для воды.
Ноги, имеющие лезвиоподобную форму, хорошо подходят для хождения по твердой земле. Ввиду того, что поверхность твердая, конечности не будут проникать в почву. «Вот почему ноги для гравия несколько толще, им нужны более широкие следы», – рассказывает Говард. Это помогло бы ногам ходить по гравию, не проваливаясь. Как снегоходы.
Толстые ноги адаптированы для воды? Они немного загадочны.
"Вода была необычной задачей, мы рассчитывали на лезвиобразные модели, как и в случае с почвой", - рассказывает Ховард" – Это позволило бы разрезать воду. Кроме того, мы ожидали, что система будет отдавать предпочтение более тонким ногам. Но она не предоставила. Мы не уверены – почему именно».
Также немного странными являются выступы, которые можно увидеть на некоторых ногах, особенно грунтовых. «Желаемая теория заключается в том, что они на самом деле служат своей цели. Но, действительно, когда мы изображаем кривые Безье в воксельной решитке, то кривая, которая кажется нецелесообразной, на самом деле является частью гораздо большей кривой, которая обеспечивает структуру внутри ноги» – говорит Ховард. Выступления выглядят «металлически как никогда», но они просто артефакты, которые, вероятно, не помогают или не мешают производительности ноги. Ховард и его коллеги настроили систему, чтобы автоматически выявлять и удалять.
Исследователи также напечатали эти ноги на 3D принтере и привязали их к роботу-гексаподу. Теперь планируется проверить, как они справляются со своей задачей на реальной поверхности по сравнению с ногами, разработанными людьми. Команда уже загрузила в симулятор стандартные человеческие ноги, и заметила, что ноги, полученные «путем эволюции» ничем не уступают и даже превосходят искусственные ноги.
Но зачем проходить из-за проблем эволюционного симулирования роботов? Во-первых, исследователи могут предоставить роботу узкую специализацию для того, чтобы он ходил в определенной области, а не полагаться на ноги общего назначения. Теоретически, это позволит работу эффективнее справиться с хождением в определенных ситуациях окружающей среды, например, песчаными дюнами.
"Если вы хотите использовать робот в другой среде, вы можете просто перезапустить алгоритм, - говорит Тоннес Нигард (Tonnes Nigard), который изучает роботов, которые изменяют форму под влиянием эволюции в Университете Осло (но не участвовал в этой новой работе). – Если вы делаете это в системе, которую создали и назначили для одной конкретной программы, то можете не иметь возможности присоединиться к процессу на поздней стадии».
Собственная система Нигарда, четвероногий робот с телескопическими ногами, на самом деле развивается в процессе. Через пробы и ошибки он учится ходить, например, по ледяной поверхности, укорачивая ноги, чтобы снизить центр тяжести. В помещении, он может удлинить их для более длинных шагов и, следовательно, более эффективного движения. Может когда-нибудь удастся совместить эти два метода: использовать симуляцию, чтобы получить красивый дизайн ноги, а затем внедрить его в реальную машину.
И если в эволюции что-то получается хорошо, то это удивляет.
«Эволюция ищет гораздо более широкие пространства», – говорит Ховард. – Ее не волнует то, на что именно похожи его произведения. Это может выглядеть совсем непохожее на работу технолога. Но если это работает – это единственное, что имеет значение».